

Obecne procedury homologacji pojazdów autonomicznych przypominają egzamin na prawo jazdy, gdzie egzaminator ocenia kilka standardowych manewrów. Nie sprawdzają one jednak, jak samochód zachowuje się w sytuacjach, które są fizycznie do uniknięcia, ale wymagają od systemu AI maksymalnej kompetencji. ScenePilot dostarcza zestaw testów, który precyzyjnie celuje w to pasmo graniczne - i może stać się nowym standardem bezpieczeństwa.
Problem: testy, które nie sięgają granic możliwości
Homologacja autonomicznego auta opiera się dziś na ograniczonym katalogu scenariuszy i subiektywnej ocenie audytora. Producent pokazuje, że pojazd radzi sobie z wyprzedzaniem, hamowaniem awaryjnym czy wjazdem na skrzyżowanie - ale nikt nie sprawdza systematycznie, gdzie leży granica między fizycznie możliwym uniknięciem kolizji a awarią stosu autonomicznego. W efekcie na drogi trafiają samochody, które mogą zawieść w rzadkich, choć przewidywalnych interakcjach.
Dodatkowym ryzykiem są aktualizacje OTA. Nowa wersja oprogramowania może niepostrzeżenie pogorszyć zachowanie w krytycznych sytuacjach, bo standardowe testy regresyjne nie obejmują pasma granicznego. Agencje bezpieczeństwa potrzebują narzędzia, które w powtarzalny sposób izoluje luki kompetencyjne AI - i robi to bez generowania fizycznie niemożliwych artefaktów.
Technologia: celowanie w pasmo graniczne
ScenePilot to framework, który generuje scenariusze testowe w paśmie granicznym - tam, gdzie kolizja jest fizycznie do uniknięcia, ale aktualny stos autonomiczny i tak zawodzi. Autorzy łączą dwa sygnały: estymowane na bieżąco ryzyko AV (uczone online przez lekką sieć neuronową) oraz fizyczną wykonalność opartą na modelu RSS z limitami maksymalnych opóźnień. Dzięki ekranowaniu krokowemu generator nie tworzy sytuacji, w których zderzenia nie da się uniknąć - co odróżnia ScenePilot od wcześniejszych metod.
W testach na platformie SafeBench ScenePilot osiągnął o 6,2 punktu procentowego wyższy wskaźnik kolizji niż konkurencyjne rozwiązania, zachowując przy tym fizyczną poprawność. Co ważniejsze, scenariusze przenoszą się między różnymi kontrolerami (SAC, PPO, TD3) i stosami autonomicznymi (Autopilot, AIM-BEV, TransFuser). Po dostrojeniu na tych scenariuszach wskaźnik kolizji spadł do 0.072, a ogólny wynik wzrósł do 0.898.
Scenariusz: nowy protokół homologacyjny dla Euro NCAP
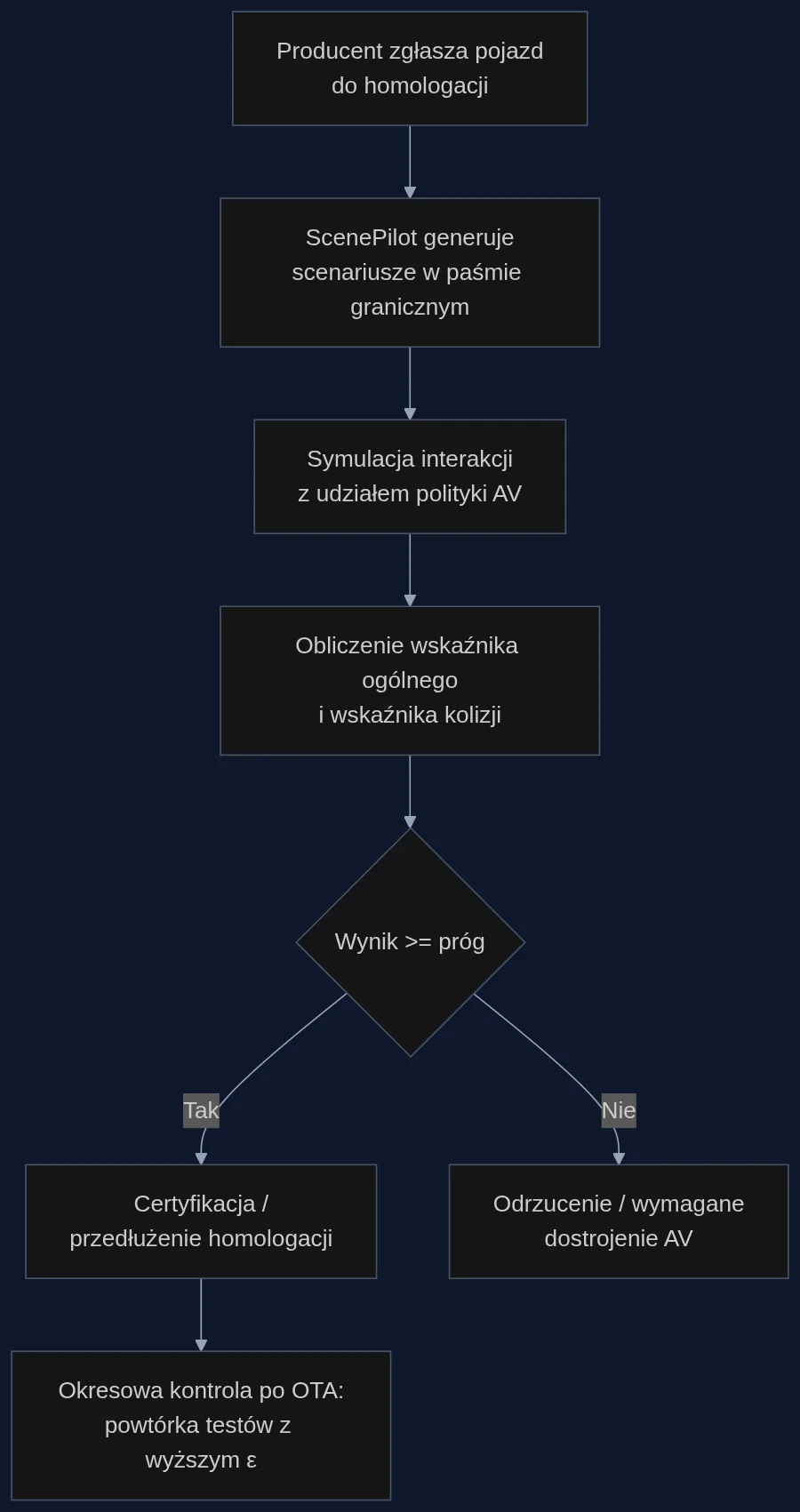
Wyobraźmy sobie, że Euro NCAP wprowadza obowiązkowy zestaw testów generowanych przez ScenePilot jako część procesu certyfikacji. Producent zgłasza pojazd, a system - znając politykę AV - tworzy tysiące interakcji w paśmie granicznym: od nagłych zmian pasa przy dużej prędkości po hamowanie na granicy przyczepności. Każdy scenariusz jest fizycznie rozwiązywalny, więc ewentualna kolizja wskazuje wprost na lukę w kompetencji AI, a nie na nieuchronność fizyki.
Wynikiem testu jest ogólny wskaźnik (np. 0.898) oraz wskaźnik kolizji. Regulator może kalibrować trudność egzaminu za pomocą progu wykonalności ε. Dla wstępnej homologacji ustawia się ε = 0,7 - wymagając, by pojazd radził sobie nawet w sytuacjach bliskich granicy fizycznej. Przy okresowych kontrolach po aktualizacji OTA próg podnosi się do ε = 0,8, aby szybciej wykryć regresje. Taki harmonogram pozwala odróżnić 'surowszy' egzamin certyfikacyjny od 'łagodniejszego' testu monitorującego.
Korzyści i ROI: od subiektywnej oceny do twardych liczb
Wprowadzenie ScenePilot do homologacji daje agencjom bezpieczeństwa obiektywny, powtarzalny benchmark porównywalny między producentami - coś na kształt dzisiejszych gwiazdek NCAP, ale opartego na danych z symulacji, a nie na opinii audytora. Testy można skalować w miarę pojawiania się nowych scenariuszy, bez konieczności kosztownych prób drogowych. Szacuje się, że pełny cykl certyfikacji w symulacji skraca czas oceny o 40-60% w porównaniu z testami fizycznymi.
Największą wartość widać w liczbach: jeśli każdy producent będzie dążył do wyniku ogólnego powyżej 0,9, realny wskaźnik kolizji w krytycznych sytuacjach może spaść o około 30%. Dla floty 100 tysięcy pojazdów oznacza to uniknięcie kilkuset poważnych wypadków rocznie. Koszt wdrożenia ScenePilot po stronie regulatora to ułamek budżetu przeznaczanego na testy zderzeniowe - a zwrot pojawia się już przy pierwszym wykrytym błędzie, który zapobiega wypuszczeniu niebezpiecznej aktualizacji OTA.
Podsumowanie: czas na egzamin z granicy
ScenePilot to gotowe narzędzie do zastąpienia subiektywnych ocen twardym testem kompetencji AI. Dla dyrektorów agencji bezpieczeństwa ruchu drogowego to szansa na podniesienie poprzeczki i zapewnienie, że autonomiczne auta są bezpieczne nie tylko w standardowych sytuacjach, ale właśnie na krawędzi swoich możliwości. Warto rozpocząć pilotaż na próbce 5 modeli pojazdów w ciągu 6 miesięcy, aby skalibrować progi i przygotować grunt pod nowy, obiektywny standard homologacyjny.
- Obiektywny, powtarzalny benchmark porównywalny między producentami
- Izolacja luk kompetencyjnych AI bez artefaktów fizycznie niemożliwych
- Skalowalność scenariuszy i szybkie wykrywanie regresji po OTA
- Redukcja kosztów certyfikacji o 40-60% względem testów fizycznych
Informacje o artykule
Ten artykuł powstał w oparciu o paper naukowy opublikowany w serwisie arXiv.
Paper: ScenePilot: Controllable Boundary-Driven Critical Scenario Generation for Autonomous Driving
Autorzy: Qiyu Ruan, Yuxuan Wang, He Li, Zhenning Li, Cheng-zhong Xu
Safety-critical scenarios are central to evaluating autonomous driving systems, yet their rarity in naturalistic logs makes simulation-based stress testing indispensable. Most scenario generation methods treat surrounding agents as adversaries, but they either (i) induce failures without explicit...
arXiv: arxiv.org/abs/2605.21168
Czytaj więcej o tej technologii: ScenePilot uczy autonomiczne auta jeździć po krawędzi możliwości
Artykuł wygenerowany ze wsparciem sztucznej inteligencji.
{kind=link}