

Firma obsługująca flotę dronów dostawczych w centrum miasta ma problem. Jej algorytm autonomicznej nawigacji przechodzi 99,9% testów symulacyjnych, ale regulator wciąż pyta o scenariusze z tego pozostałego ułamka. Zatwierdzenie lotów nad głowami przechodniów wymaga udowodnienia, że system nie zawiedzie w sytuacjach skrajnych, choć fizycznie prawdopodobnych. Inżynierowie nie potrzebują kolejnych losowych testów - potrzebują narzędzia, które precyzyjnie trafi w lukę kompetencyjną ich własnego oprogramowania.
Luka między symulacją a betonem
Autonomiczna nawigacja w przestrzeni 3D jest trudniejsza niż jazda po drodze. Dron ma sześć stopni swobody, musi reagować na podmuchy wiatru, ptaki i innych użytkowników przestrzeni. Tradycyjne testy opierają się na odtwarzaniu losowych sytuacji lub ręcznym rzeźbieniu przypadków brzegowych. Efekt? Zespoły marnują czas na analizowanie fizycznie niemożliwych manewrów, jak przeciążenie 15G przy uniku, albo odwrotnie - testy są zbyt łatwe i nie ujawniają wad oprogramowania. Projekty utykają w fazie certyfikacji EASA na długie miesiące właśnie przez tę nieefektywność w poszukiwaniu prawdziwych słabości.
Powietrzne RSS i pasmo graniczne
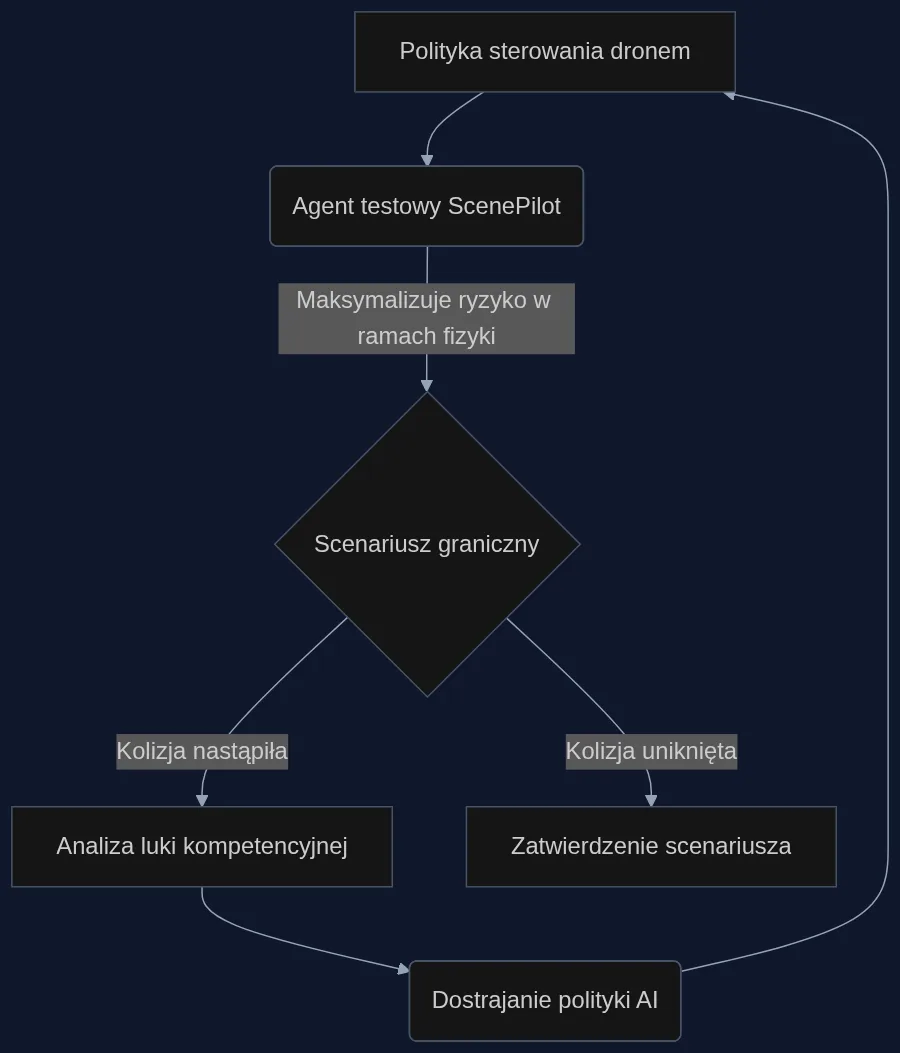
Odpowiedzią jest adaptacja frameworka ScenePilot, który z powodzeniem testuje już autonomiczne auta na drogach. Zamiast pasa ruchu, mamy teraz korytarz powietrzny. Kluczowy jest tu koncept 'pasma granicznego'. Wyobraźmy sobie 'powietrzne RSS' (Responsibility-Sensitive Safety) - zestaw fizycznych limitów dla drona: maksymalne przeciążenie, prędkość wznoszenia, kątowa prędkość obrotu. Scenariusz uznaje się za fizycznie wykonalny, gdy istnieje przynajmniej jeden manewr, powiedzmy gwałtowne wznoszenie przy 2G, który pozwala uniknąć kolizji.
Agent AI testujący drona jest szkolony tak, by maksymalizować ryzyko wtargnięcia, ale w ramach tych limitów. Nie dostanie punktów za zaprogramowanie stada ptaków lecących 500 km/h, bo to fizycznie niemożliwe. Dostanie je za symulację balonu reklamowego, który nieoczekiwanie zmienia kurs w wąskiej uliczce - sytuację bardzo trudną, ale realną. To właśnie granica między 'uratowałem się' a 'rozbitym', gdzie ujawniają się niedoskonałości algorytmów wizyjnych i decyzyjnych.
Test graniczny przy dostawie medycznej
Rozpatrzmy dostawę przesyłki medycznej do szpitala w centrum Warszawy. Dron przelatuje między wieżowcami. Algorytm wizyjny skanuje przestrzeń. Nagle, zza rogu, niesiony porywem wiatru, wypada balon reklamowy. Jednocześnie z lewej strony pojawia się stado gołębi. Standardowy system wchodzi w tryb awaryjny - zawis, który przy silnych porywach okazuje się niestabilny i prowadzi do przeciągnięcia.
ScenePilot w procesie treningu odkrywa dokładnie tę sekwencję: kombinację turbulencji i wtargnięcia obiektu, która dla akurat tego modelu sieci neuronowej jest najtrudniejsza. Generuje setki wariantów tej sytuacji. Nie tylko znajduje moment, w którym stos autonomiczny zawodzi, ale też wyznacza twardą granicę fizyki - punkt, w którym dron musi awaryjnie lądować na dachu, bo żaden manewr nie uchroni go przed zderzeniem.
Szybsza certyfikacja i twardszy kod
Główny zysk to czas. Zamiast ręcznego analizowania tysięcy godzin logów, zespół ds. bezpieczeństwa otrzymuje w dwa tygodnie skoncentrowaną paczkę krytycznych scenariuszy. Te, które system przeszedł, trafiają do rejestru bezpieczeństwa. Te, które oblał, idą do inżynierów od uczenia maszynowego. Dostrajanie polityki sterowania na takim skondensowanym zestawie przypadków granicznych daje wymierny efekt. W testach z pojazdami autonomicznymi osiągnięto spadek wskaźnika kolizji do poziomu 0.072 i ogólny wynik 0.898 po jednej iteracji dostrajania.
Dla drona wartego 100 000 zł lub producenta eVTOL, gdzie każdy dzień opóźnienia certyfikacji kosztuje setki tysięcy euro, zastosowanie tej metody to bezpośredni wpływ na wynik finansowy. Szacujemy, że można skrócić fazę testów wirtualnych o 30-40% i obniżyć ryzyko kosztownej utraty sprzętu w realnych testach granicznych.
Konkretny krok przed audytem
Ta metoda nie zastępuje fizycznych testów ani audytu EASA. Daje natomiast coś innego: twardy dowód, że algorytm został poddany próbie w każdym fizycznie możliwym, ekstremalnym wariancie i że znamy dokładnie jego granice. Dla szefów bezpieczeństwa i CTO firm z branży dronów i eVTOL rekomendacja jest prosta: zaimplementować 'powietrzny ScenePilot' w pętli testowej przed następnym spotkaniem z regulatorem. To inwestycja rzędu kilku tygodni pracy inżynieryjnej, która może skrócić certyfikację o kwartały. Warto zacząć od próbki 500 najbardziej ryzykownych scenariuszy z ostatnich audytów i porównać wyniki z obecną metodologią.
- Redukcja czasu testów wirtualnych o 30-40%
- Wyższa odporność algorytmu na awarie w warunkach granicznych
- Mocniejsza pozycja w procesie certyfikacji EASA
Informacje o artykule
Ten artykuł powstał w oparciu o paper naukowy opublikowany w serwisie arXiv.
Paper: ScenePilot: Controllable Boundary-Driven Critical Scenario Generation for Autonomous Driving
Autorzy: Qiyu Ruan, Yuxuan Wang, He Li, Zhenning Li, Cheng-zhong Xu
Safety-critical scenarios are central to evaluating autonomous driving systems, yet their rarity in naturalistic logs makes simulation-based stress testing indispensable. Most scenario generation methods treat surrounding agents as adversaries, but they either (i) induce failures without explicit...
arXiv: arxiv.org/abs/2605.21168
Czytaj więcej o tej technologii: ScenePilot uczy autonomiczne auta jeździć po krawędzi możliwości
Artykuł wygenerowany ze wsparciem sztucznej inteligencji.
{kind=link}