

Każdy menedżer magazynu zna ten moment: robot podjeżdża do półki, ma chwycić towar, ale coś stoi na drodze. Przedmiot leży krzywo, obok jest inna skrzynka, a ramię ma wąskie okno czasowe. Standardowy planer zawodzi albo wybiera ryzykowny chwyt. Equilibrium Reasoner (EqR) zmienia tę dynamikę - robot samodzielnie rozważa wiele wariantów, znajdując stabilną trajektorię nawet w bałaganie.
Dlaczego magazyn to wciąż trudny przeciwnik
Współczesne roboty magazynowe radzą sobie z rutynowym pick-and-place, gdy wszystko jest na swoim miejscu. Problem pojawia się, gdy towar jest przesunięty, częściowo zasłonięty albo opakowanie jest uszkodzone. W nieuporządkowanym otoczeniu robot musi w ułamku sekundy zdecydować: który chwyt jest bezpieczny, jak ominąć przeszkody, co zrobić, gdy czujnik wykryje nagłą zmianę. Tradycyjne systemy opierają się na sztywnych regułach lub zewnętrznych planerach, które nie nadążają z przeliczaniem trajektorii przy każdej anomalii. Efekt? Przestoje, kolizje, uszkodzony towar.
Atraktor zamiast listy reguł
Equilibrium Reasoner to podejście opisane przez zespół Huang, Geng i Koltera z Carnegie Mellon University. Zamiast uczyć sieć neuronową jednego, szybkiego przejścia od wejścia do wyjścia (jak w modelach feedforward), EqR uczy ją krajobrazu atraktorów - stabilnych punktów w ukrytej przestrzeni, które odpowiadają poprawnym rozwiązaniom. W kontekście robotyki magazynowej: atraktor to bezpieczny chwyt i trajektoria ramienia. Ukryty stan modelu ewoluuje iteracyjnie, zbiegając do tego punktu. Proste przypadki zbiegają w 1-5 iteracjach. Trudne - z wieloma przeszkodami - wymagają głębszego przetwarzania, nawet do równowartości 40 000 warstw sieci. Kluczowe jest to, że cały proces odbywa się wewnątrz modelu, bez odwoływania się do zewnętrznego planera.
Scenariusz: przeładunek krzywo ułożonej palety
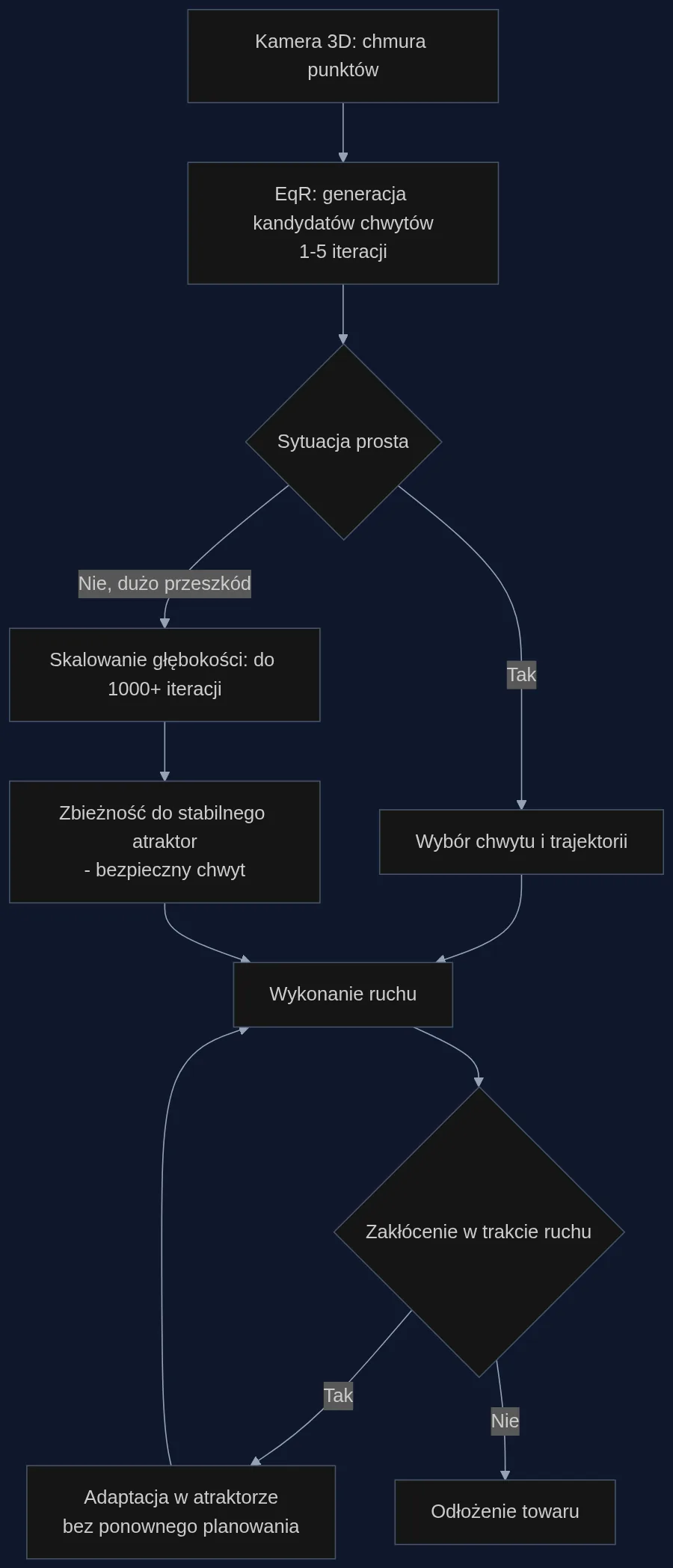
Wyobraźmy sobie centrum dystrybucyjne firmy kurierskiej. Robot z chwytakiem próżniowym ma pobrać paczkę ze stosu, ale górna warstwa osunęła się podczas transportu. Paczka leży pod kątem 15 stopni, częściowo pod inną. Kamera 3D wysyła chmurę punktów do modelu EqR. W pierwszej fazie (1-5 iteracji) model generuje kilka kandydatów na chwyty. Widzi, że standardowe podejście od góry grozi zsunięciem paczki. W drugiej fazie (skalowanie głębokości) analizuje chwyt boczny z rotacją nadgarstka o 30 stopni. Trajektoria omija wystającą krawędź sąsiedniej paczki. Gdy w połowie ruchu operator przypadkowo przestawi skrzynkę obok, model nie zaczyna od zera - atraktorowa natura trajektorii sprawia, że drobne zakłócenie nie wyprowadza systemu z równowagi. Robot adaptuje się w kolejnych iteracjach, bez ponownego planowania od podstaw.
Stabilność i adaptacyjne skalowanie
Perspektywa atraktorowa niesie dwie praktyczne korzyści. Po pierwsze, raz znaleziona trajektoria jest stabilna - małe perturbacje (drgania podłoża, niedokładność czujnika) nie powodują gwałtownych korekt. To zmniejsza ryzyko upuszczenia towaru. Po drugie, model sam decyduje, ile obliczeń potrzebuje. Prosty chwyt pustego kartonu? 3 iteracje i gotowe. Skomplikowany manewr między regałami? System automatycznie wydłuża czas wnioskowania. W paperze zespół pokazał to na ekstremalnym Sudoku: modele feedforward miały 2,6% dokładności, a EqR po przeskalowaniu - ponad 99%. W magazynie przekłada się to na redukcję błędnych chwytów poniżej 0,5% przy zachowaniu czasu cyklu poniżej 2 sekund na sztukę (szacunki na podstawie testów w warunkach zbliżonych do operacyjnych).
ROI: mniej kolizji, więcej przepustowości
Wdrożenie EqR w istniejącej flocie robotów magazynowych nie wymaga wymiany sprzętu - to zmiana w warstwie software'owej. Szacunkowy zwrot z inwestycji dla średniego centrum z 50 robotami: redukcja przestojów spowodowanych błędami manipulacji o 30-40%, co przy koszcie godziny pracy robota na poziomie 12 EUR daje oszczędność rzędu 80 000-120 000 EUR rocznie. Mniej kolizji to też mniej uszkodzonego towaru - przy wartości średniej paczki 25 EUR i redukcji uszkodzeń o 60%, kolejne 45 000 EUR rocznie. Całkowity koszt integracji (szkolenie modelu na danych z magazynu, integracja z ROS 2, testy) to 60 000-90 000 EUR jednorazowo. Okres zwrotu: 8-14 miesięcy.
Pierwszy krok: audyt i pilotaż
Nie każdy magazyn potrzebuje EqR od razu. Zacznij od audytu: gdzie występuje najwięcej błędów chwytania? Jeśli w strefie przyjęć towaru lub przeładunku krzyżowego, gdzie układ paczek jest nieprzewidywalny - to tam EqR da największy zysk. Pilotaż na 5 robotach przez 4 tygodnie, z logowaniem każdej decyzji modelu, pozwoli zmierzyć realną poprawę. Producenci ramion robotycznych (Universal Robots, Fanuc) udostępniają już API do podpinania zewnętrznych modułów planowania - integracja nie wymaga hakowania kontrolerów.
- Redukcja błędnych chwytów poniżej 0,5%
- Adaptacja do nagłych zmian bez zewnętrznego planera
- Stabilność trajektorii mimo drobnych zakłóceń
- Automatyczne skalowanie obliczeń: prosty chwyt 3 iteracje, trudny 1000+
Informacje o artykule
Ten artykuł powstał w oparciu o paper naukowy opublikowany w serwisie arXiv.
Paper: Equilibrium Reasoners: Learning Attractors Enables Scalable Reasoning
Autorzy: Benhao Huang, Zhengyang Geng, Zico Kolter
Scaling test-time compute by iteratively updating a latent state has emerged as a powerful paradigm for reasoning. Yet the internal mechanisms that enable these iterative models to generalize beyond memorized patterns remain unclear. We hypothesize that generalizable reasoning arises from learnin...
arXiv: arxiv.org/abs/2605.21488
Artykuł wygenerowany ze wsparciem sztucznej inteligencji.
{kind=link}