
Kiedy testujesz autonomiczne auto, chcesz znać nie tylko banalne przypadki, ale też moment, w którym system zawodzi - mimo że fizycznie dałoby się uniknąć wypadku. ScenePilot to framework, który generuje dokładnie takie scenariusze: trudne, ale wykonalne, na granicy fizyki i możliwości sztucznej inteligencji. Dzięki temu odsłania luki, które w realnym ruchu mogą kosztować życie.
Dlaczego zwykłe testy nie wystarczają
Wyobraź sobie egzamin na prawo jazdy, który sprawdza tylko znajomość znaków - albo zadaje pytania bez odpowiedzi. Tak wygląda testowanie autonomicznej jazdy. Symulatory generują albo trywialne sytuacje (jazda gęsiego), albo fizycznie niemożliwe kraksy (przeszkoda znikąd). Żaden z tych przypadków nie pokazuje, gdzie system naprawdę zawodzi.
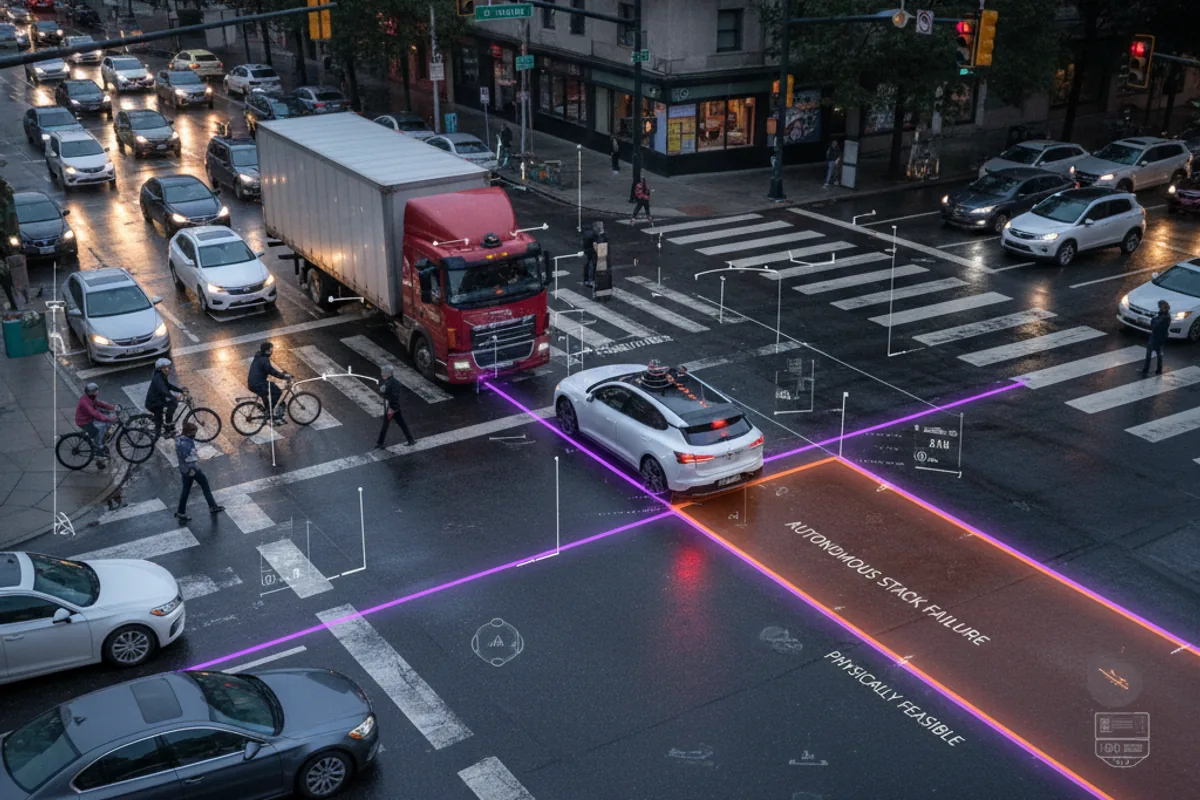
ScenePilot celuje w pasmo graniczne - scenariusze, które są fizycznie rozwiązywalne (człowiek by wyhamował), ale wciąż wywracają autonomiczny stos. To tam siedzą luki kompetencyjne: błędy nie z praw fizyki, tylko z ograniczeń oprogramowania.
Dwa sygnały zamiast jednego - jak działa silnik testów
ScenePilot ocenia każdą milisekundę symulacji dwoma sygnałami. Pierwszy to ryzyko AV - lekka sieć neuronowa ucząca się na bieżąco, która szacuje, czy pojazd autonomiczny zaraz w coś uderzy. Drugi to fizyczna wykonalność, wyliczana z modelu RSS (Responsibility-Sensitive Safety) - formalnych reguł definiujących bezpieczną odległość hamowania i skrętu.
RSS odpowiada na pytanie: 'Czy przy maksymalnym opóźnieniu i idealnym sterowaniu da się uniknąć zderzenia?'. Jeśli tak, scenariusz jest fizycznie możliwy (sigma ≥ 0). ScenePilot używa tego jako ograniczenia - scenariusze muszą być wykonalne, ale na tyle blisko granicy, żeby system miał kłopoty.
Generowanie takich przypadków to gra adwersarza: inny pojazd próbuje sprowokować wypadek, nie łamiąc praw fizyki. Gdy zbytnio zbliża się do naruszenia wykonalności, ekranowanie krokowe przełącza cel z 'narób kłopotów' na 'odzyskaj fizyczną poprawność'. To jak asekuracja w sporcie - zawodnik atakuje, ale sędzia pilnuje przepisów.
Uważamy, że to pasmo graniczne najlepiej izoluje luki kompetencyjne: awarie, które nie wynikają z nieuniknionych praw fizyki, lecz z ograniczeń obecnego stosu autonomicznego.
Autorzy
Sekcja 1, Wprowadzenie
Więcej stłuczek, ale tylko tych prawdziwych
Na platformie SafeBench ScenePilot osiągnął wskaźnik kolizji o 6,2 punktu procentowego wyższy niż konkurencyjne metody. Nie zwiększył przy tym liczby fizycznie niemożliwych ramek - odsetek artefaktów pozostał znikomy. Nie generuje chaosu, tylko precyzyjnie wyszukuje momenty, w których autonomiczny stos zawodzi.
Scenariusze przenoszą się na różne kontrolery (SAC, PPO, TD3) - wykryte luki nie są przypadłością jednego modelu, ale głębszą słabością architektury. Dostrajanie systemu właśnie na tych przypadkach dało najsilniejszą poprawę: wskaźnik kolizji spadł do 0,072, a ogólny wynik bezpieczeństwa wzrósł do 0,898. Trening na losowych lub łatwych przypadkach nie dawał takiego efektu.
Od symulatora do rzeczywistego ruchu
W gęstszym ruchu wskaźnik kolizji ScenePilot rośnie tylko nieznacznie, a ogólny wynik nawet się poprawia. To ważne, bo prawdziwe ulice rzadko są puste.
Badacze sprawdzili generowane scenariusze na kilku stosach autonomicznych: Autopilot, AIM-BEV, TransFuser i BehaviorAgent. Każdy miał problemy w tych samych sytuacjach granicznych. Metoda trafia w uniwersalne słabości - nie konkretnego systemu, ale całej klasy rozwiązań opartych na głębokim uczeniu.
- ScenePilot zwiększa wykrywalność kolizji o 6,2 pp., nie generując przy tym fizycznych absurdów.
- Scenariusze przenoszą się między różnymi kontrolerami i stosami autonomicznymi - luki są uniwersalne.
- Dostrajanie na tych krytycznych przypadkach daje najniższy wskaźnik wypadków i najlepszy wynik ogólny.
- Metoda skutecznie radzi sobie w gęstym ruchu, co przybliża ją do realnych warunków drogowych.
Praktyczne zastosowania
Aby lepiej zrozumieć opisywaną innowację, przygotowaliśmy cztery przykłady praktycznego zastosowania tej technologii w różnych branżach:



Podsumowanie
ScenePilot to narzędzie, które może przyspieszyć rozwój bezpiecznych autonomicznych pojazdów, znajdując ich słabości szybciej i celniej niż dotychczasowe symulatory. Ta sama filozofia - generowanie testów na granicy tego, co fizycznie możliwe, ale dla systemu trudne - sprawdzi się nie tylko w motoryzacji. Można ją przenieść do testowania dronów dostawczych w zatłoczonych przestrzeniach miejskich, robotów współpracujących z ludźmi na halach produkcyjnych, czy nawet systemów AI w energetyce, gdzie jeden błąd na krawędzi stabilności sieci może mieć poważne skutki.
Metryka artykułu źródłowego
Tytuł oryginalny: ScenePilot: Controllable Boundary-Driven Critical Scenario Generation for Autonomous Driving
Autorzy: Qiyu Ruan, Yuxuan Wang, He Li, Zhenning Li, Cheng-zhong Xu
Data publikacji: 21 maja 2026
arXiv: arxiv.org/abs/2605.21168
Napisanie tego artykułu zostało wspomagane przez sztuczną inteligencję. Treść opiera się na oryginalnym artykule naukowym, a jej dokładność została zweryfikowana automatycznie.
{kind=link}