

Projektowanie sterownika dla egzoszkieletu kończyn dolnych od lat przypomina próbę dopasowania garnituru szytego na miarę do kogoś, kto ciągle zmienia wymiary. Każdy pacjent ma inną biomechanikę, inny stopień niedowładu i inaczej reaguje na zaburzenia równowagi. Standardowe podejście wymaga żmudnych, kosztownych iteracji w laboratorium chodu, gdzie inżynier ręcznie dostraja dziesiątki parametrów. Nowa metodologia, oparta na samouczącym się agencie naukowym operującym w symulacji, obiecuje wywrócić ten model do góry nogami, generując czytelne, spersonalizowane prawa sterowania w ciągu godzin, a nie miesięcy.
Od rybiego ogona do ludzkiego chodu
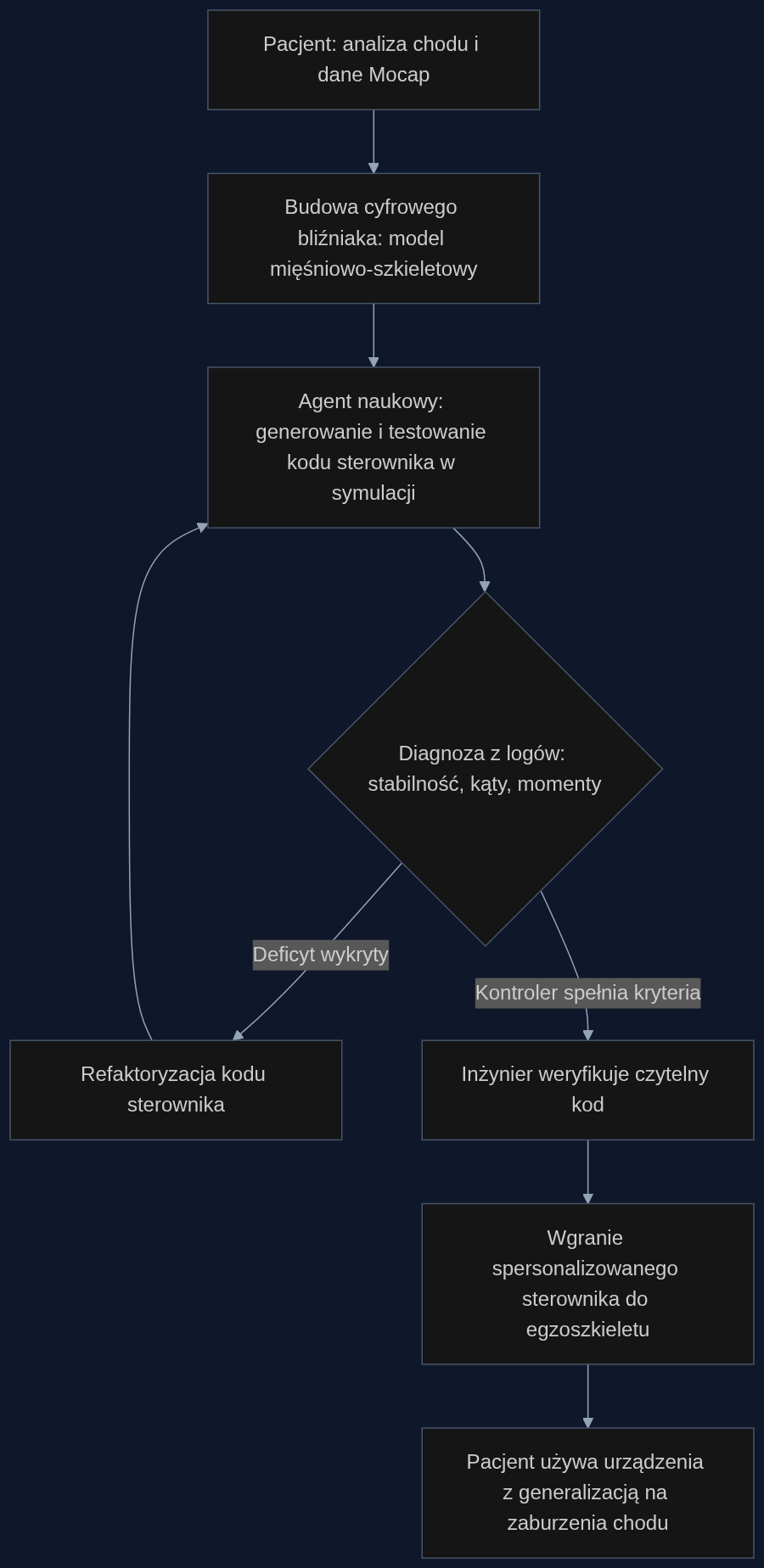
Opisywana w literaturze koncepcja agenta naukowego startuje od prostego, ‘propulsyjnego’ algorytmu bazowego i ewoluuje go w uniwersalny kontroler. W oryginalnym badaniu dotyczyło to dwustawowego modelu ryby, ale mechanizm przenosi się na biomechanikę człowieka zaskakująco gładko. Wyobraźmy sobie pacjenta po udarze z niedowładem połowiczym. Jego model mięśniowo-szkieletowy, zasilony danymi z systemów przechwytywania ruchu (motion capture), trafia do środowiska symulacyjnego. Agent, zamiast stroić wagi sieci neuronowej, generuje kod źródłowy sterownika – na przykład w Pythonie lub C++ – i testuje tysiące jego wariantów. Obserwuje kąty w stawie kolanowym i biodrowym, momenty sił, środek nacisku stopy i margines stabilności podczas każdego wirtualnego kroku. Jeśli pacjent w symulacji zaczyna utykać lub przewraca się przy symulowanym potknięciu, agent diagnozuje przyczynę na podstawie logów i wprowadza poprawki w kodzie. Po kilku tysiącach iteracji powstaje kontroler, który jest w pełni czytelny dla inżyniera biomedycznego – widzi on jawną logikę: ‘jeśli kąt zgięcia kolana w fazie przenoszenia spada poniżej X, zwiększ wspomaganie momentu o Y’. To nie jest czarna skrzynka, tylko udokumentowane rozumowanie fizyczne.
Scenariusz: klinika ortopedyczna wdraża egzoszkielet nowej generacji
Weźmy średniej wielkości klinikę ortopedyczną, która ma kontrakt z producentem egzoszkieletów. Do tej pory dopasowanie urządzenia do pacjenta z niepełnym porażeniem kończyn dolnych (poziom L1-L2) wymagało trzech wizyt technika i fizjoterapeuty. Łączny koszt: około 4500 złotych za samo strojenie. Nowy workflow, oparty na agencie naukowym, wygląda następująco. Pacjent podczas pierwszej wizyty przechodzi standardową analizę chodu na bieżni z platformami dynamometrycznymi. Dane te budują cyfrowy bliźniak jego układu ruchu. Agent, działając na serwerze producenta lub lokalnie w klinice, przez noc generuje spersonalizowany sterownik. Rano fizjoterapeuta przegląda wygenerowany kod, zatwierdza kluczowe parametry bezpieczeństwa i wgrywa go do egzoszkieletu. Pacjent dostaje też wariant kontrolera z ‘adaptacyjnym odciążeniem kadencji’ (adaptive cadence relief), który płynnie redukuje wspomaganie, gdy czujniki wykryją, że pacjent samodzielnie radzi sobie z utrzymaniem rytmu chodu na prostym odcinku. To kluczowe dla reedukacji nerwowo-mięśniowej – urządzenie nie wyręcza bezrefleksyjnie, tylko asekuruje.
Generalizacja, która ratuje przed upadkiem
Największą zmorą obecnych egzoszkieletów jest sztywny podział na tryby: ‘chód po płaskim’, ‘schody’, ‘siadanie’. Przełączenie wymaga świadomej komendy użytkownika lub detekcji gestu, co zawodzi przy niespodziewanych zdarzeniach. Agent naukowy udowodnił w oryginalnym badaniu, że potrafi odkryć kontroler generalizujący na nieznane wcześniej cele statyczne i dynamiczne, bez rozgałęzień warunkowych. W kontekście rehabilitacji oznacza to, że egzoszkielet nie musi ‘wiedzieć’, że pacjent się potknął, żeby zareagować. Sterownik, bazując na sprzężeniu zwrotnym z prędkości kątowej tułowia (yaw-rate feedback) i bieżącej krzywiźnie środka nacisku, automatycznie wygeneruje sekwencję wspomagania, która zapobiegnie upadkowi. Mówimy tu o reakcji w ułamku sekundy, wypracowanej nie na drodze kosztownych prób klinicznych z udziałem asekurujących fizjoterapeutów, ale w symulacji, gdzie agent celowo ‘podkładał nogę’ cyfrowemu modelowi pacjenta setki razy, ucząc się, jakie sekwencje momentów sił przywracają stabilność.
Zwrot z inwestycji i realne oszczędności
Z perspektywy producenta sprzętu rehabilitacyjnego, automatyzacja projektowania sterowników to redukcja kosztów R&D o 30-40 procent w przeliczeniu na jeden model egzoszkieletu. Zamiast zespołu trzech inżynierów przez cztery miesiące, ten sam rezultat osiąga dwóch inżynierów weryfikujących wyniki agenta przez miesiąc. Dla kliniki, skrócenie procesu dopasowania z trzech wizyt do jednej to oszczędność około 3000 złotych na pacjenta i zwiększenie przepustowości gabinetu o 25 procent. Ale największa korzyść jest trudniej mierzalna: spadek liczby upadków wśród użytkowników egzoszkieletów. Według szacunków Krajowej Rady Fizjoterapeutów, jeden upadek pacjenta z egzoszkieletem generuje średnio 12 000 złotych dodatkowych kosztów leczenia powikłań. Jeśli generalizujący kontroler zmniejszy liczbę takich incydentów choćby o 15 procent, zwrot z inwestycji w symulacyjny system projektowania staje się oczywisty w ciągu pierwszego roku.
Audytowalność jako warunek certyfikacji medycznej
Branża medyczna nie może sobie pozwolić na ‘zaufaj nam, sieć neuronowa tak zdecydowała’. Każda decyzja urządzenia aktywnego, które przykłada siłę do ciała pacjenta, musi być wytłumaczalna przed notyfikowaną jednostką certyfikującą. To właśnie jest piętą achillesową głębokiego uczenia w sprzęcie medycznym. Agent naukowy rozwiązuje ten problem wprost: cała ścieżka ewolucji kontrolera jest logowana. Inspektor może prześledzić, że w iteracji numer 3472 agent zdiagnozował niedostateczną stabilność w płaszczyźnie czołowej przy prędkości 2 km/h i dodał warunek korekcyjny oparty na momencie odwodziciela stawu biodrowego. Ta transparentność, łącząca fizyczne dowody z symulacji z konkretnymi linijkami kodu, może skrócić proces certyfikacji wyrobu medycznego klasy IIa nawet o jedną trzecią. To nie jest marginalna korzyść – to różnica między wejściem na rynek w 12 a w 18 miesięcy.
- Redukcja kosztów strojenia egzoszkieletu o 3000 zł na pacjenta
- Skrócenie procesu dopasowania z trzech wizyt do jednej
- Wzrost bezpieczeństwa dzięki generalizacji na nieprzewidziane potknięcia i zaburzenia równowagi
- W pełni czytelny kod sterownika ułatwiający audyt i certyfikację medyczną
- Zmniejszenie kosztów R&D producenta o 30-40 procent na model urządzenia
Informacje o artykule
Ten artykuł powstał w oparciu o paper naukowy opublikowany w serwisie arXiv.
Paper: Self-Evolving Scientific Agent Discovers Generalizable Physically-Reasoned Fluid Control
Autorzy: Boai Sun, Wenjin Guo, Zongmin Yu, Liu Yang
While data-intensive deep reinforcement learning can optimize complex control policies, scientific discovery in physical systems fundamentally requires an interpretable chain of reasoning that connects physical evidence to structured control architectures. Here, we present a self-evolving scienti…
arXiv: arxiv.org/abs/2606.08405
Artykuł wygenerowany ze wsparciem sztucznej inteligencji.
{kind=link}