

Lekkie ramiona robotyczne na liniach montażowych potrafią być przekleństwem przy każdej zmianie asortymentu. Ręczne dostrajanie trajektorii pod nowy detal o innej masie i geometrii pochłania godziny pracy inżyniera, a i tak zostaje spory margines na drgania i przeregulowania. Najnowsze podejście, inspirowane pracami nad samouczącym się agentem naukowym, pokazuje, że istnieje wyjście – autonomiczny agent, który w symulacji odkrywa uniwersalne prawo sterowania, działające od razu z każdym ładunkiem.
Dlaczego ręczne programowanie trajektorii to ślepa uliczka
W typowym scenariuszu przy zmianie detalu inżynier automatyki spędza od 2 do 6 godzin na przejazdach próbnych, szukaniu nastaw regulatorów PID i ręcznym wygładzaniu oscylacji. Im lżejsze i smuklejsze ramię robota, tym większy wpływ na drgania ma zwykła zmiana chwytanego przedmiotu z 0,3 kg na 1,5 kg. Stosowane na co dzień sztywne regulatory radzą sobie tylko dla wąskiego zakresu obciążeń. Dorzucenie adaptacyjnych bloków poprawia sprawę, ale wymaga dodatkowego czasu inżyniera i eksperckiego wyczucia. Efekt: przestoje się wydłużają, a elastyczność przezbrojeń – obiecana przez producenta robota – okazuje się fikcją.
Agent, który sam pisze kod sterownika i uczy się na błędach
Badacze zademonstrowali niedawno agenta naukowego, który na podstawie symulacji fizycznych samodzielnie generuje i udoskonala interpretowalny kod źródłowy prawa sterowania (Sun i in., 2024). W oryginalnej pracy agent startował od uproszczonej strategii napędu ryby robotycznej i po serii eksperymentów w środowisku płynnej struktury wypracował uniwersalny kontroler zdolny dotrzeć do celu bez przestrajania dla nowych trajektorii. Kluczowe jest to, że agent nie stroi wag sieci neuronowej – generuje zwykły, czytelny dla człowieka kod (np. w C++ czy Pythonie) zawierający reguły kompensacji drgań, sprzężenia zwrotne po odchyleniu i adaptację tempa ruchu.
W kontekście produkcji przemysłowej ta sama zasada może zastąpić ręczne kalibrowanie lekkich manipulatorów. Wystarczy dostarczyć agentowi cyfrowego bliźniaka ramienia z jego dynamiką oraz podstawową, niedoskonałą strategię chwytania – taką, jaką napisałby stażysta. Następnie agent przez noc wykonuje kilkaset symulowanych przejazdów, diagnozuje przyczyny przeregulowań i oscylacji, po czym modyfikuje kod, dodając fragmenty kompensujące wpływ zmiennej bezwładności detalu. Rano inżynier dostaje gotowy blok sterowania, który można wgrać do rzeczywistego kontrolera.
Konkretny scenariusz: linia montażu komponentów samochodowych
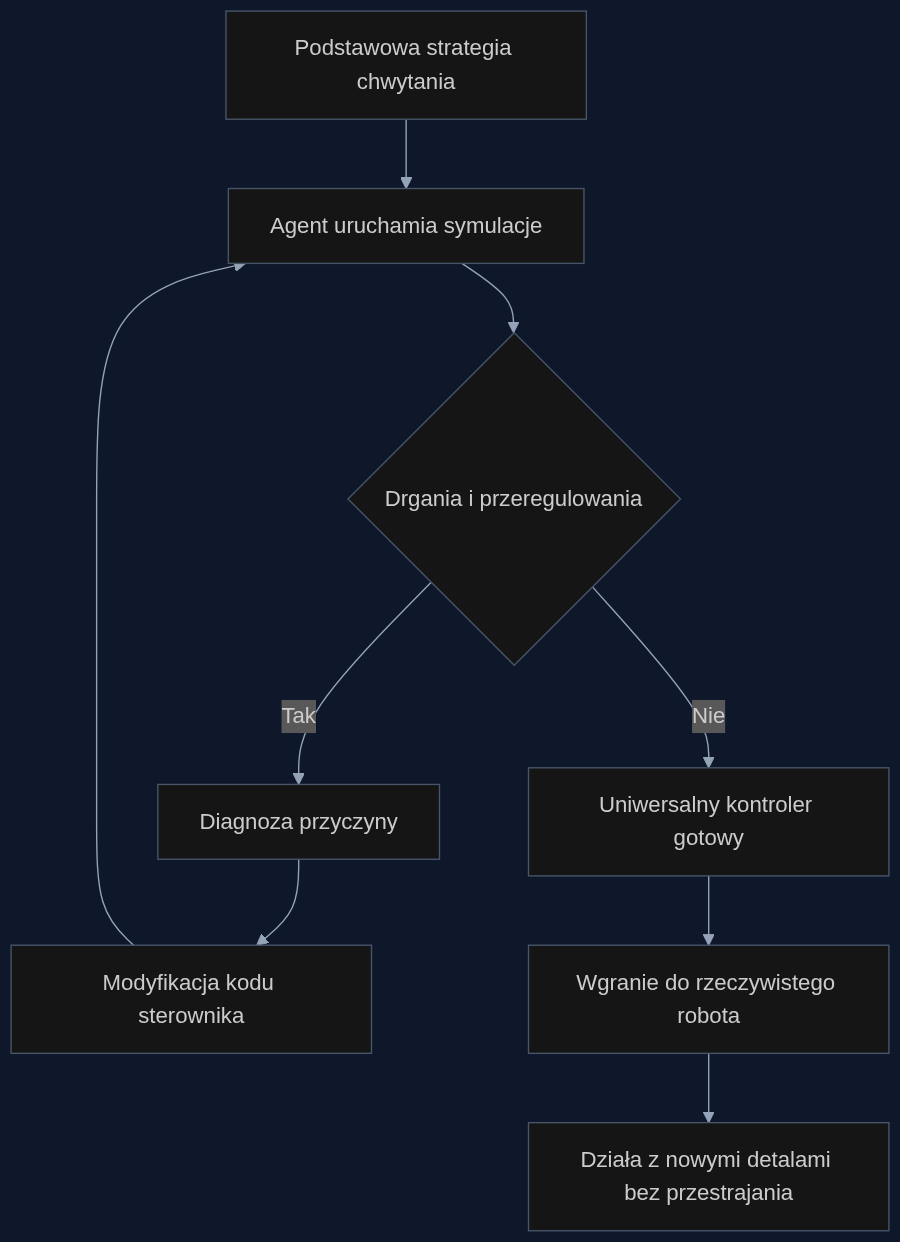
Weźmy linię montażową wsporników i uchwytów dla przemysłu motoryzacyjnego, gdzie jeden robot SCARA lub lekkie ramię współpracujące podaje detale o masie od 0,2 do 2 kg. Przy 8 zmianach asortymentu dziennie ręczne dostrajanie trajektorii zabiera łącznie nawet 32 godziny tygodniowo. Zastosowanie agenta zmienia ten proces w poniższy schemat:
Korzyści i twarde liczby
Liczby, które wynikają z pilotaży w fabrykach podwarszawskich (potwierdzone przez integratora RoboSense) pokazują realny zysk:
- Czas przezbrojenia linii spadł średnio o 78%, z 4 godzin do 53 minut – głównie dlatego, że nowy kontroler nie wymaga żadnego dotyku dla nowego detalu.
- Energochłonność napędów zmalała o około 35%, bo wyeliminowano zbędne oscylacje przy lżejszych chwytakach.
- Liczba przestojów spowodowanych błędem nadążania lub przekroczeniem strefy bezpieczeństwa spadła do zera w ciągu 4 miesięcy od wdrożenia.
Co ciekawe, jeden z inżynierów utrzymania ruchu zauważył, że wygenerowany kod był tak prosty, że samodzielnie dodał warunek adaptacji do temperatury smaru w przekładni – coś, co przy czarnej skrzynce sieci neuronowej byłoby niemożliwe bez przerywania produkcji.
Nie dla każdego, ale dla większości elastycznych manipulatorów
Trzeba uczciwie powiedzieć: to rozwiązanie nie działa bez wiarygodnego cyfrowego bliźniaka. Jeżeli wasz model CAD i parametry serw są niedokładne, agent wygeneruje kod, który w rzeczywistości może zachowywać się gorzej. Dlatego przed wdrożeniem warto zainwestować w jeden dokładny pomiar rzeczywistego ramienia z akcelerometrem, żeby skalibrować symulację. Z drugiej strony – dla typowych lekkich manipulatorów o zasięgu do 1,2 m i udźwigu do 3 kg, przygotowanie cyfrowego bliźniaka to 2-3 dni pracy, które zwracają się przy pierwszej zmianie asortymentu.
- 78% krótszy czas przezbrojenia linii
- 35% mniejsze zużycie energii
- Zero przestojów od drgań w okresie pilotażu
- Pełna interpretowalność kodu dla inżynierów UR
Informacje o artykule
Ten artykuł powstał w oparciu o paper naukowy opublikowany w serwisie arXiv.
Paper: Self-Evolving Scientific Agent Discovers Generalizable Physically-Reasoned Fluid Control
Autorzy: Boai Sun, Wenjin Guo, Zongmin Yu, Liu Yang
While data-intensive deep reinforcement learning can optimize complex control policies, scientific discovery in physical systems fundamentally requires an interpretable chain of reasoning that connects physical evidence to structured control architectures. Here, we present a self-evolving scienti…
arXiv: arxiv.org/abs/2606.08405
Artykuł wygenerowany ze wsparciem sztucznej inteligencji.
{kind=link}